PLC对机器人干涉区的控制
2020-05-11 11:32
来源:电子说
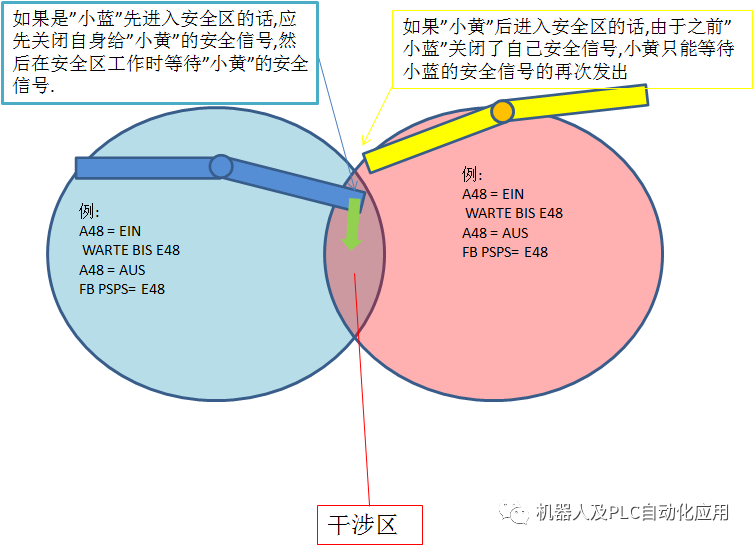
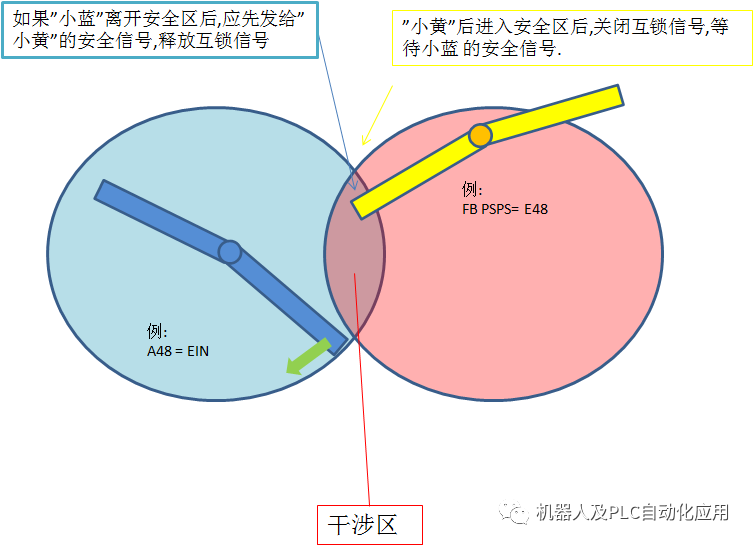
1.进入安全区时:
如果是”小蓝”先进入安全区的话,应先关闭自身给”小黄”的安全信号,然后在安全区工作时等待”小黄”的安全信号.
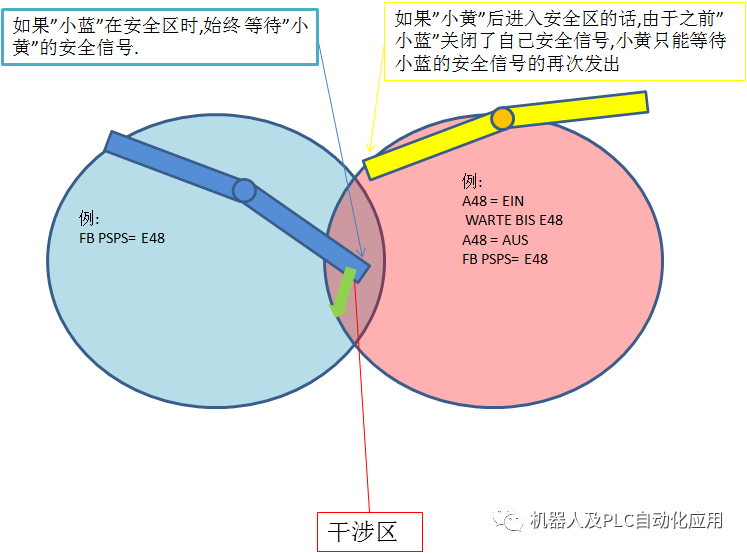
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出
2.在安全区时:
如果”小蓝”在安全区时,始终 等待”小黄”的安全信号.
3.离开安全区时:
如果”小蓝”离开安全区后,应先发给”小黄”的安全信号,释放互锁信号.
”小黄”后进入安全区后,关闭互锁信号,等待小蓝的安全信号.
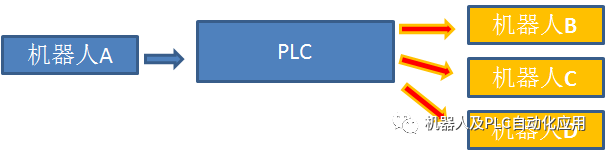
PLC对机器人干涉区的控制:
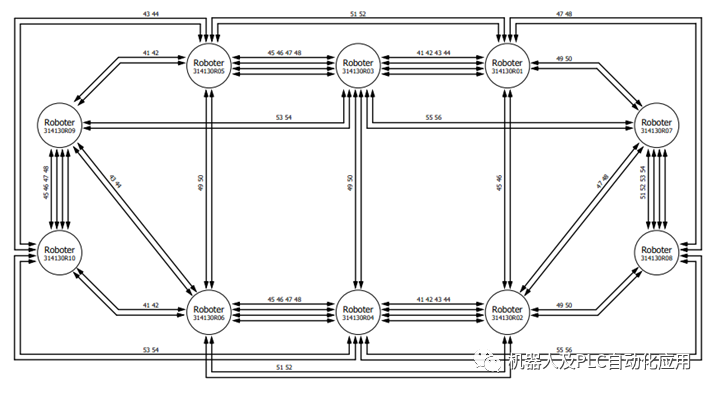
VASS 标准使用的互锁标准:互锁示意图,设定机器人之间互锁所使用的IO范围.
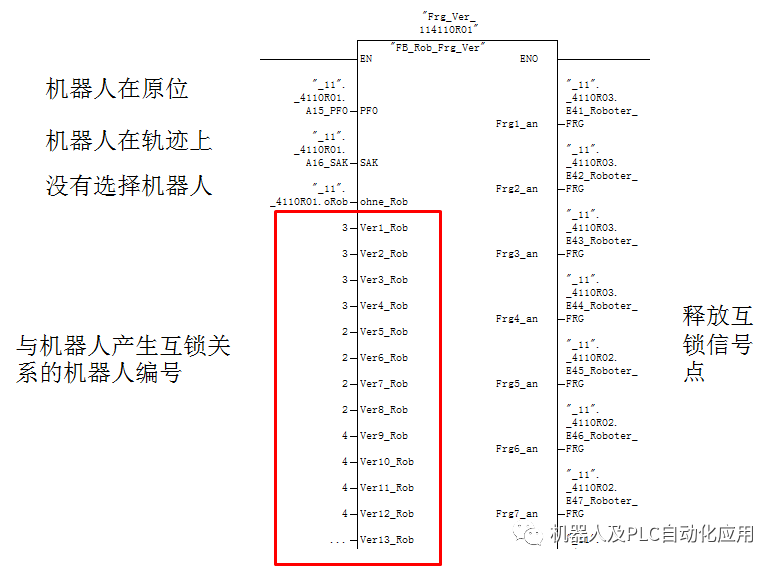
FB207机器人互锁信号控制:
可以设置机器人在原位时默认发出互锁释放信号.
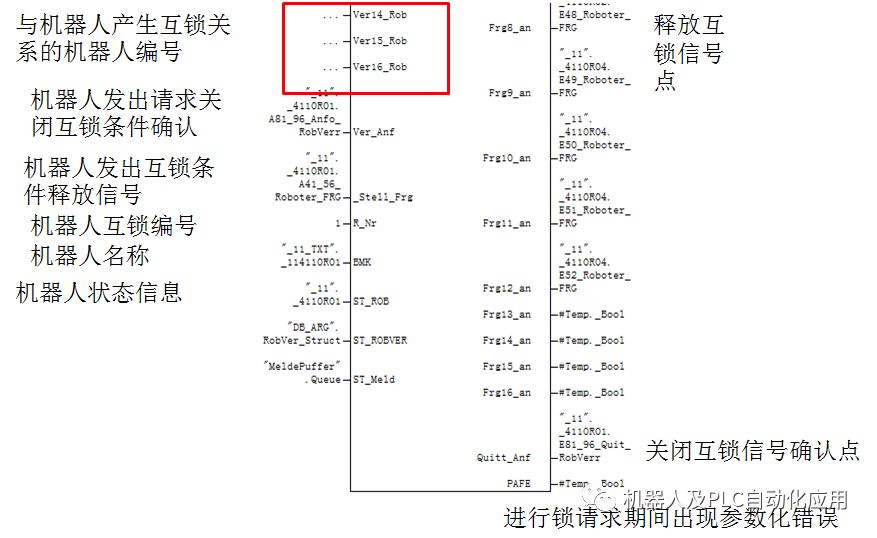
发出互锁条件:
关闭互锁条件:
释放互锁信号
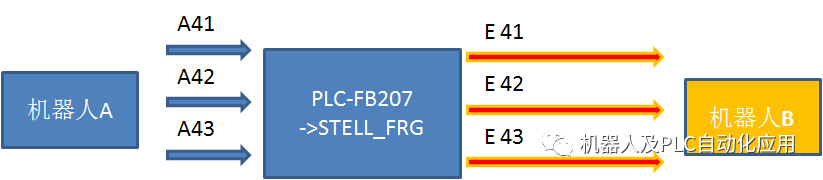
7: A41 = EIN
9: A42 = EIN
11: A43 = EIN
13: A44 = EIN
关闭部分互锁信号,开始进入干涉区工作。
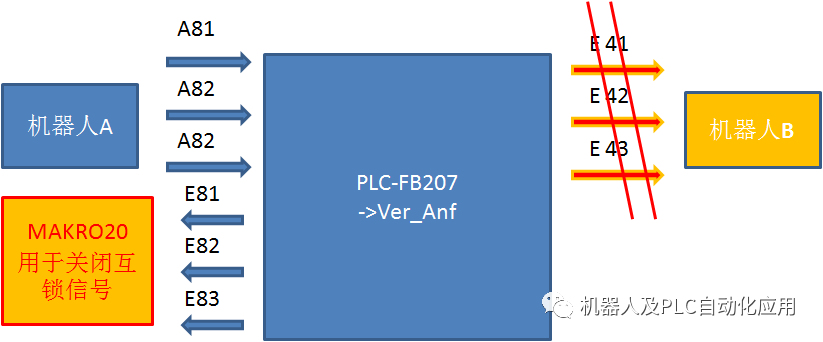
30: A81 = EIN
31: A83 = EIN
32: SPSMAKRO20 = EIN 关闭A41和A43的互锁信号
35: FB PSPS = E41 & E43
等待其他机器人给入的互锁信号才能进入干涉区工作
离开干涉区后再次发出互锁信号
4: A41 = EIN
6: A43 = EIN
FB PSPS = M1 & M30机器人不用再等干涉信号
延伸 · 阅读
- 2020-05-11 11:32稳压器是怎么工作的?
- 2020-05-11 11:32苹果13有哪些新技术 苹果iPhone13有哪些新功能?
- 2020-05-11 11:32七牛云X苏州广播电视总台:为什么电视画面越来越清晰流畅
- 2020-05-11 11:32Intel DG2独立显卡曝光 基于Intel 7nm EUV工艺打造
- 2020-05-11 11:32iphone13promax哪个颜色好看?
- 2020-05-11 11:32伺服电机维护伺服电机故障与维护