PFO飞行热熔激光焊接
2020-05-11 11:38
来源:电子说
PFO飞行热熔激光焊接
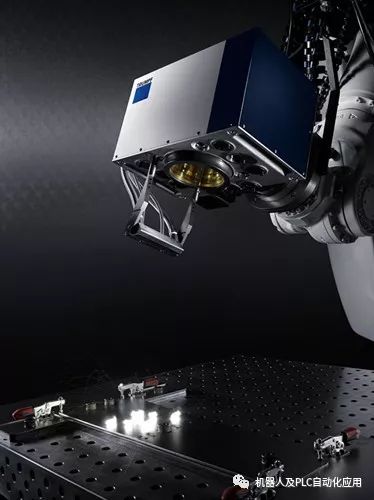
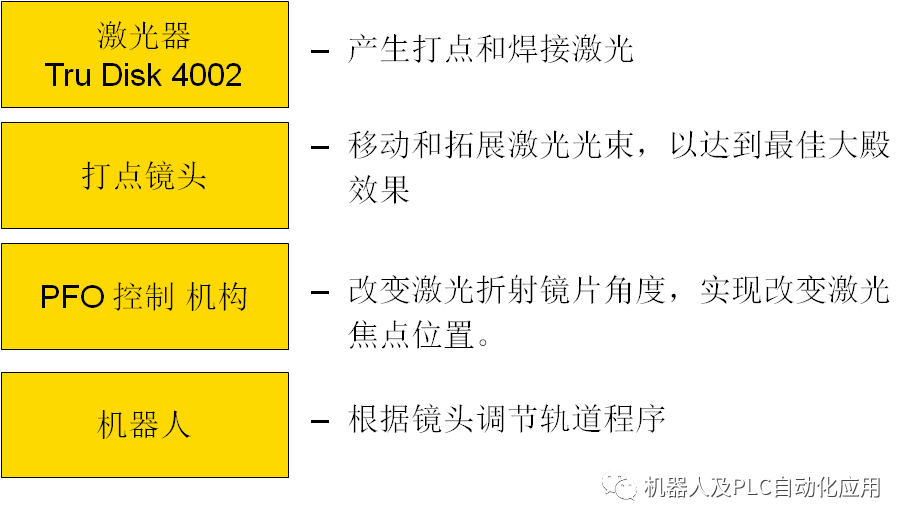
控制示意图:
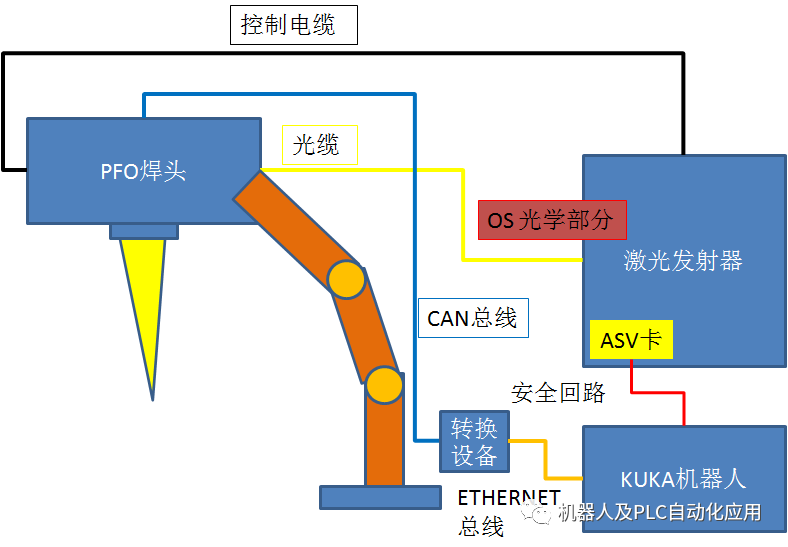
机器人使用插件:
PFODRIVER 插件
ECAT_SYS_X44插件
机器人CCU版接口X44:Ethernet总线地址:172.20.3.3
转换器设备的设备EtherNET总线地址:172.20.3.99
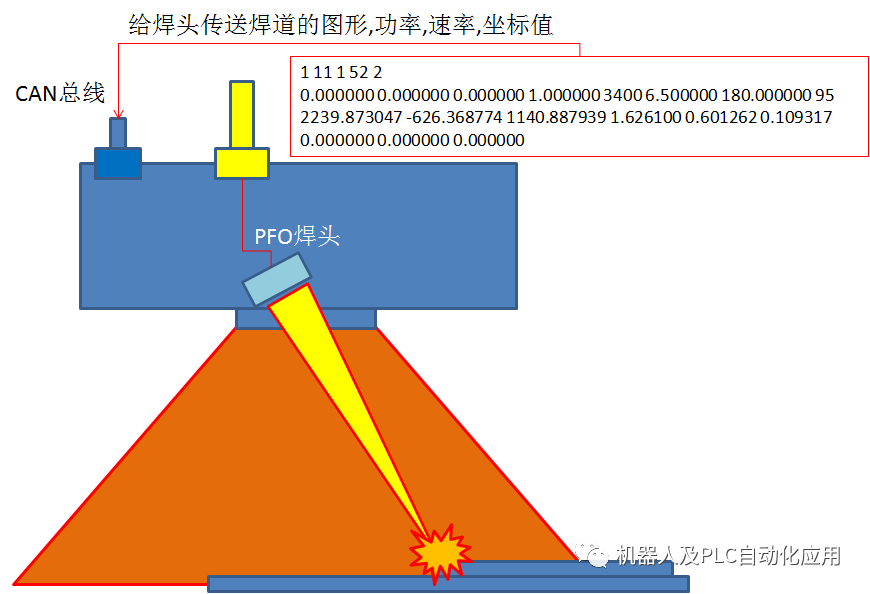
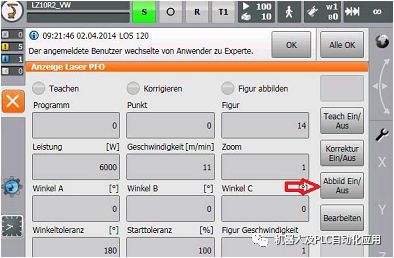
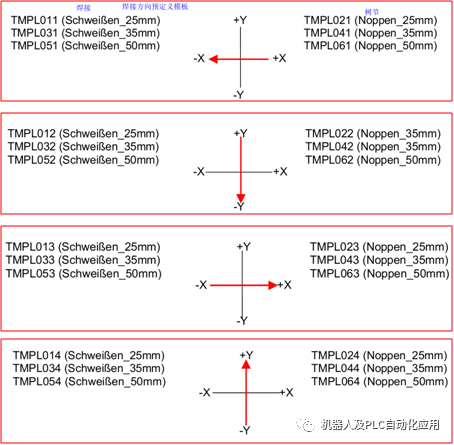
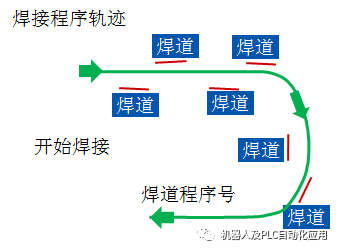
固定图形的长度和方向用不同的图像号来代替
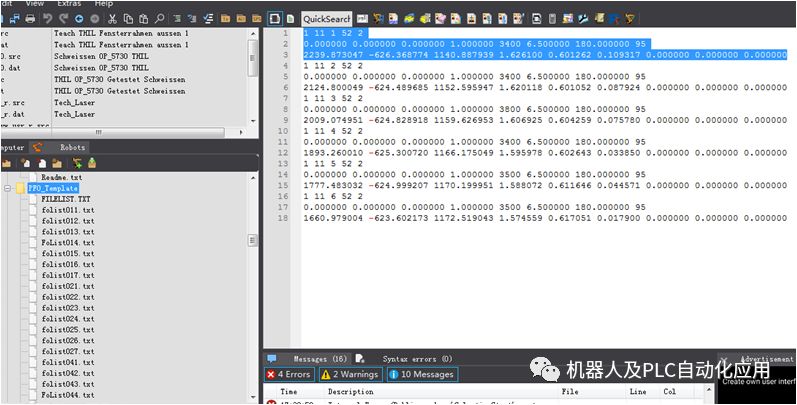
焊道位置示教程序分析
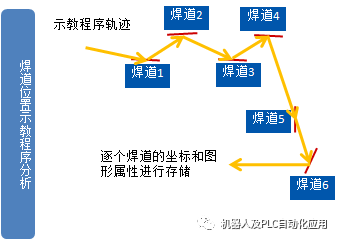
1.机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
使用软件库中的标准图形的用户程序

2: VW_PFO VIRT_PUNKT Programm=14 Punkt=7 Betriebsart =fahre ZIRK Auftrag = Teach Template Rampe = Ende
使用圆弧进行焊接
2: VW_PFO VIRT_PUNKT Programm=14 Punkt=8 Betriebsart =fahre PTP Auftrag = Teach Template Rampe = AUS
使用PTP点到点进行焊接
3: VW_PFO VIRT_PUNKT Programm=56 Punk t=2 Betriebsart =fahre LIN Auftrag = Teach Template Rampe = AUS
使用LIN点到点进行焊接
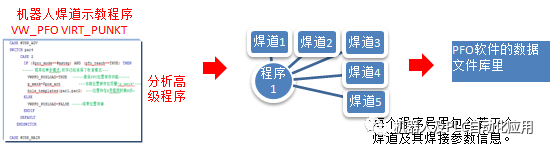
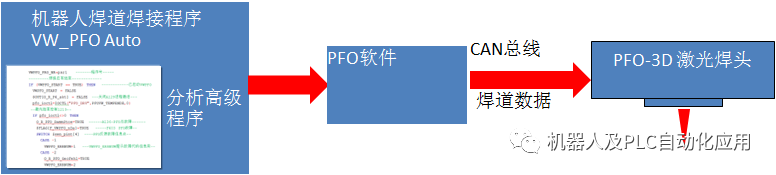
焊接程序分析
2.机器人在执行飞行焊接程序时,通过KUKA 用户程序调用焊道的程序号,给PFO软件,然后PFO软件将此程序号里激活的所有焊道及其数据都通过CAN总线发送给PFO焊头,焊头对此程序号内所有焊道逐一进行焊接。

延伸 · 阅读
- 2020-05-11 11:38受疫情影响 CMOS图像传感器的销售额将下降4%
- 2020-05-11 11:38谷歌等厂商公布开源雷达API标准Ripple
- 2020-05-11 11:38Nanka全新Runner Pro3 骨传导耳机新高度 为超越而生
- 2020-05-11 11:38回心转意?美国拟允许美国企业与华为共同参与5G标准制定
- 2020-05-11 11:38使用矢量网络分析仪教程
- 2020-05-11 11:38鸿蒙升级后发生了哪些变化