关于KUKA机器人MD_CMD 函数用法解析
2020-05-11 11:39
来源:电子说
MD_CMD 用于激活轴驱动器的函数。
现在主要用于与机器人安全控制软件相关联。
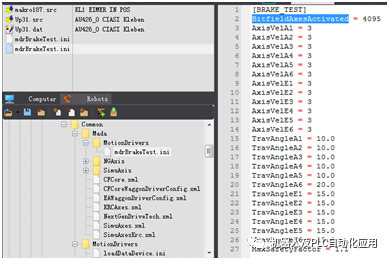
Ret = MD_CMD(brakeTestDevName[],"START_TEST", IntArray[], RealArray[]); brakeTestDevName[]="BRAKE_TEST"抱闸测试与相关文件相关联
Ret 反馈值
"START_TEST" 控制开始测试
"END_TEST" 结束抱闸测试
"GET_RESULT" 抱闸测试获得结果
"SELECT_TARGET" 选择目标触发
"GET_ROB_ANGLES" 获得机器人的轴角度
"GET_EXT_ANGLES" 获得机器人的轴角度
"TRIGGER_TEST_RUN" 触发抱闸测试运行
"SIGNAL_PARK_POS" 停车信号位置
"FINISH_TEST_RUN" 完成测试运行
IntArray[] 整数形式值输出
RealArray[]实数形式值输出
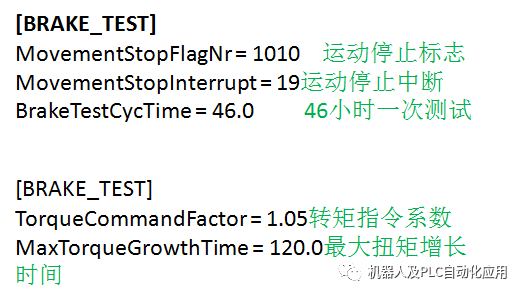
"BRAKE_TEST" 抱闸测试相关文件
现出售安全机器人和其PLC控制全套个人总结资料,有意者请与微信号18943047820 联系,本次更新了几个USER程序的更详细分析和控制安全机器人的功能块,之前买过的朋友可以直接联系我,升级教程。
延伸 · 阅读
- 2020-05-11 11:39AI自主可控人工智能生产平台中的实践总结
- 2020-05-11 11:39为什么小米明明是外行 电动车却备受期待?
- 2020-05-11 11:39我国开通5G基站11.3万个
- 2020-05-11 11:39恩智浦:TSN的推出对工业4.0意味着什么?
- 2020-05-11 11:39COVID-19的物联网和创新机遇挑战
- 2020-05-11 11:39无人机配送迎新机遇,商用普及之路或加速